
Annonse

Roboter kan bidra til å avlaste et overbelastet helsevesen
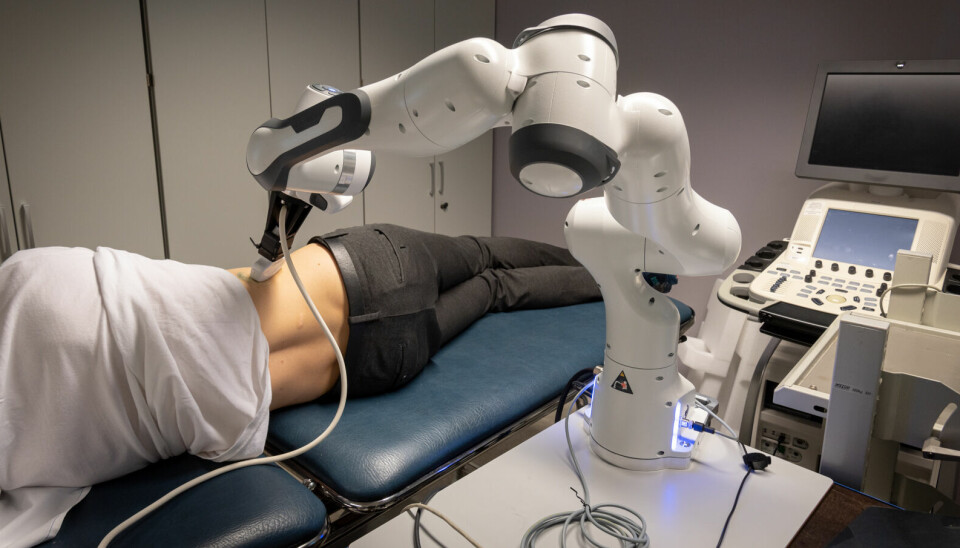
POPULÆRVITENSKAP: Kan du forestille deg helseinstitusjoner hvor roboter utfører ultralydundersøkelser?


Publisert

Forskersonen er forskning.nos side for debatt og populærvitenskap
Med kunstig intelligens har roboter potensialet til å utføre ultralydundersøkelser på nivå med mennesker, noe som kan gi betydelige fordeler til et overbelastet helsevesen. Robotisert ultralyd kan bidra med ekstra hjelp ved datainnsamling, og dermed øke sykehusets kapasitet til å betjene flere pasienter.
Videre kan det bidra til å standardisere undersøkelsene og gjøre det enklere å sammenligne målinger, noe som kan forbedre oppfølging og behandlingsforløpet til pasienten. I tillegg kan robotisert ultralyd øke muligheten for at flere helsepersonell kan utføre eller overvåke denne typen undersøkelser, og dermed redusere behovet for eksperter som det er lite tilgang på.
Faktaboks
- Bak arbeidene står det et tverrfaglig team med eksperter innen medisin, ultralyd, robotikk og kunstig intelligens.
- Sentrale bidragsytere er Cristiana Golfetto, Andreas Østvik, Martin Albertsen Brandt, Javier Pérez de Frutos, Lars Eirik Bø, Esten Ingar Grøtli, Marialena Vagia, Klaus Ening, Geir Arne Tangen og Jan Tommy Gravdahl.
Robotisert ultralyd?
I SINTEF har vi troen på samarbeid mellom robot og menneske. Målet vårt er å utvikle robotsystemer som kan utføre ultralydundersøkelser helt autonomt.
Organene i kroppen din ligger ikke helt stille, men beveger seg når du puster, og i enkelte behandlinger er det helt avgjørende å vite nøyaktig hvor et organ er til enhver tid. Dette kan eksempelvis være under sjokkbølgebehandling av nyrestein, hvor det er viktig å treffe nyresteinene med bølgene slik at friskt vev ikke blir skadet. Et annet eksempel er nålebiopsi, hvor det er kritisk at biopsinålen treffer på riktig sted.
Fordelene med robotisert ultralyd
Slike prosedyrer gjøres ultralydveiledet, men det kreves god hånd-øye koordinasjon av klinikerne for å kunne følge organer i bevegelse over tid. På grunn av organenes bevegelse er det derfor i praksis vanlig å holde ultralydproben i ro under selve prosedyren.
En ultralydrobot kan i teorien tolke bilder og andre sensordata automatisk, og bevege seg basert på denne tolkningen. Dette muliggjør stabile og sentrerte ultralydbilder av organer i bevegelse, noe som kan være svært nyttig.
Annonse
Eksempelvis, i forbindelse med oppfølging av pasienter er dette spesielt interessant, da analysene blir mer standardiserte, og dermed også mer sammenlignbare.
Hvis vi kan lære roboter å utføre ultralydundersøkelser av organer i bevegelse, kan dette åpne for nye målinger- og overvåkningsmuligheter for medisinske undersøkelser.
Kunstig intelligens, ultralyd og robotarmer
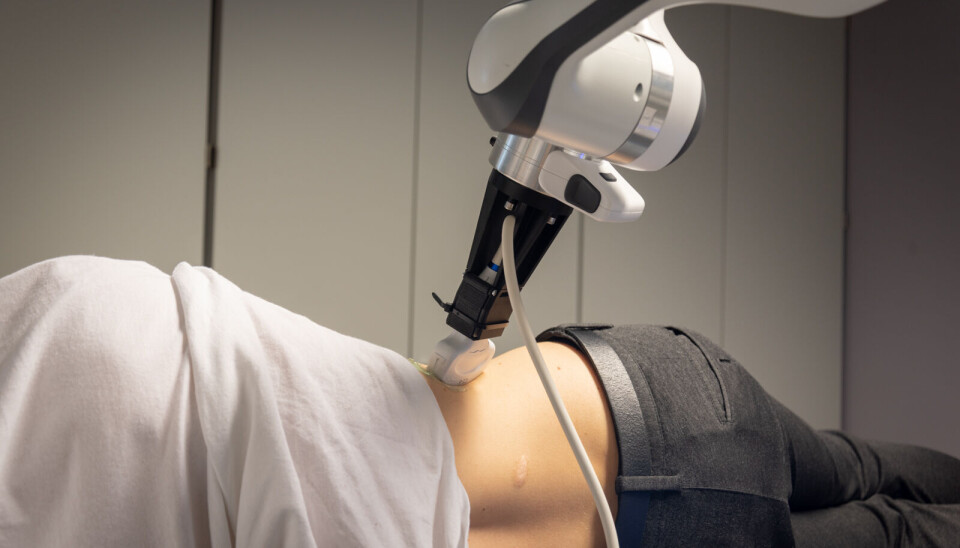
Så hvordan vil disse robotene se ut og hva skal de gjøre? Robotsystemet består av en robotarm utstyrt med en ultralydprobe, og AI-algoritmer som er opplært til å identifisere organer i ultralydbildet og følge det ved å bevege proben i sanntid.
Hvis vi kan lære roboter å utføre ultralydundersøkelser av organer i bevegelse, kan dette åpne for nye målinger- og overvåkningsmuligheter for medisinske undersøkelser.
Arbeidet har utspring fra et samarbeid mellom forskere i SINTEF Digital og NTNU som startet i 2017. Der undersøkte de robotinteraksjon med objekter i bevegelse for flere bruksområder, deriblant robotisert ultralydskanning av hovedpulsåren i magen.
Den krevende veien til autonom ultralydskanning
Det er mange utfordringer i dette prosjektet, blant annet at vi anvender moderne robotarmer og algoritmer for å oppnå «ettergivende» og menneskelignende interaksjon med pasienten.
Dette betyr at roboten adaptivt endrer kraften den bruker på ultralydproben. Dette gjør interaksjonen med mennesker tryggere, men er mer utfordrende å programmere.
Annonse
Det gjør det spesielt utfordrende når vi også trenger en robust algoritme for å finne organet i ultralydbildet, slik at roboten kan følge bevegelsene til organet over tid. Å opprettholde presis kontroll og balanse gjennom hele opptaksprosessen er avgjørende; vi ønsker å minimere trykket for å hindre pasientens ubehag, samtidig som vi vil sikre optimal akustisk kontakt for å oppnå best mulig bildekvalitet.
Det er utvilsomt betydelige oppgaver og hindringer fremover. Teamet vårt møter disse utfordringene med stor entusiasme og pågangsmot. Visjonen om helseinstitusjoner med roboter som jobber sammen med mennesker er et inspirerende mål vi streber etter å oppnå. For hvert steg vi tar, beveger vi oss nærmere målet om å transformere visjonen til virkelighet.
(Artikkelen er oversatt fra engelsk til norsk av Martin Albertsen Brandt)















